 Tiskane izdaje
Tiskane izdaje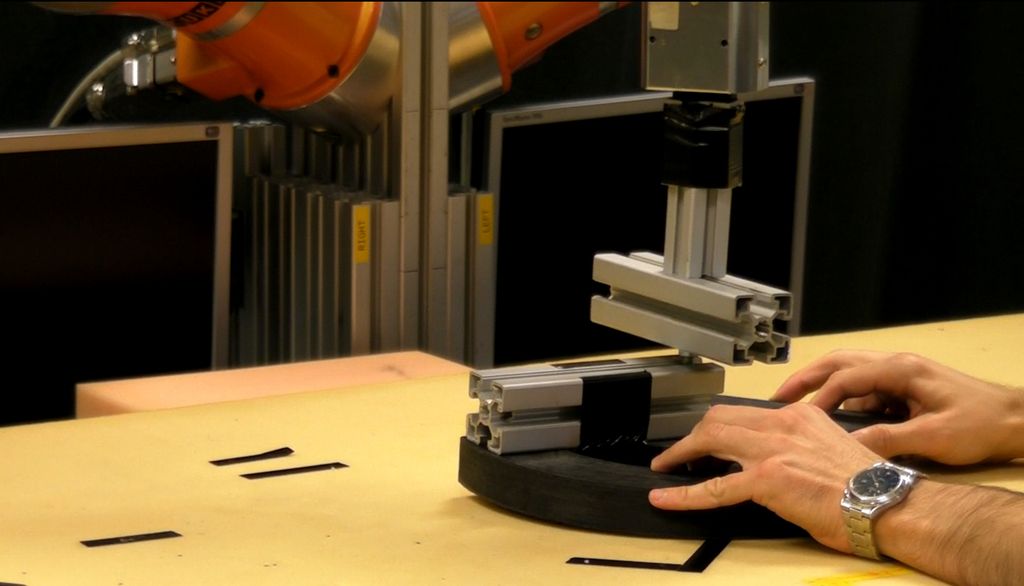




Človekov skelet in mišice, ki ga obdajajo, se zdi kot popolna naprava, ki nam omogoča, da se lahko gibamo skoraj kjerkoli, da se lahko naučimo kateregakoli opravila in da se prilagodimo kateremukoli okolju, ki nas obdaja. Te sposobnosti so bile navdih raziskovalcev in inženirjev, že odkar obstajata znanost in tehnika.
Če bi naš mišično-skeletni sistem primerjali s klavirjem, ima približno desetkrat več mišic, kot ima klavir tipk, in naši možgani so kot čudežni otrok, ki se nanje v prvih par letih življenja brez posebnega napora nauči igrati najlepše koncerte. Večina nas se le redko zaveda, kako zapleteni in obširni matematični procesi potekajo v naših možganih, medtem ko se gibamo in opravljamo tudi najpreprostejša opravila. Ko se brez napora usedemo za mizo in sežemo po skodelici kave, naši možgani s prefinjeno natančnostjo določijo, s kakšno jakostjo in trajanjem naj se aktivira večina mišic v našem telesu.
Dandanes je veliko poskusov, da bi izdelali robote, ki bi nas lahko nadomestili pri nevarnih in zahtevnih opravilih, pa vendar so uspehi zelo skromni in največkrat uporabni za zgolj zelo omejene naloge, ki so po svoji zahtevnosti primerljive z gibanjem nekaj let starega otroka. Zanimivo je, da so sodobni računalniki, ki upravljajo robote, v večini tehničnih lastnosti bistveno zmogljivejši od naših možganov, pa jih kljub temu ne znamo sprogramirati, da bi znali upravljati robotski mehanizem tako, kot lahko mi z našimi možgani upravljamo naše telo.
V naši skupini na odseku za avtomatiko, biokibernetiko in robotiko Instituta Jožef Stefan želimo prispevati k razumevanju, kako naši možgani vodijo gibanje našega telesa. Glavni poudarek naših raziskav je razumeti, kako centralni živčni sistem obdeluje senzorske informacije in jih pretvori v signale, ki aktivirajo mišice. Zanima nas robustnost izvajanja gibanja in prilagajanje na stalne spremembe, ki se dogajajo v našem okolju. Da bi odgovorili na ta vprašanja, izvajamo razne eksperimente, pri katerih se testne osebe učijo izvajati določene gibe, medtem ko jih raziskovalci s pomočjo robotskih sistemov sistematično motimo. Tako ustvarjamo novo okolje, na katero se morajo osebe, za uspešno izvajanje gibov, prilagoditi.
Primer tovrstnega eksperimenta je izvajanje počepov, medtem ko se robotska ploščad, na kateri osebe stojijo, premika glede na gibanje človekovega težišča; ali pa seganje z roko, medtem ko robot, pričvrščen na človekovo roko, nanjo med gibanjem izvaja sile, ki so odvisne od hitrosti gibanja. Ljudje seveda nismo vajeni počepanja v pogojih, ko se pod nami premikajo tla; ali seganja, ko nas neka sila vleče drugam, kot nas sila gravitacije. Se pa lahko, po zaslugi plastičnosti naših možganov, zelo hitro in učinkovito prilagajamo na nova okolja.

Primer eksperimenta, kjer mora oseba držati svoje ravnotežje, medtem ko nanjo v ledvenem predelu poseben sistem izvaja sile. Na levi strani je v ozadju paralelna robotska ploščad, ki jo uporabljamo za motenje ravnotežja. Foto: Jan Babič
S tovrstnimi eksperimenti raziskovalci poustvarimo del motoričnega učenja otroka, ko se po rojstvu prvič uči premikanja svojega telesa. Medtem ko se testne osebe učijo gibanja v novem okolju, pa raziskovalci s pomočjo merilnih naprav skrbno merimo gibanje telesa, sile, ki jih prek stopal osebe proizvajajo na podlago, električno aktivnost mišic in zadnje čase, s pomočjo sodobne tehnologije, tudi električno aktivnost možganov.
Na podlagi meritev nato razvijamo matematične modele nevralnih procesov, ki potekajo med učenjem gibanja in prek katerih naši možgani iterativno prilagajajo aktivnosti mišic, da je lahko naše gibanje pravilno, stabilno in energijsko učinkovito. Takšne matematične modele lahko nato uporabimo pri razvoju širokega nabora robotskih sistemov, kot so industrijski roboti, humanoidi, eksoskeleti in rehabilitacijske naprave.
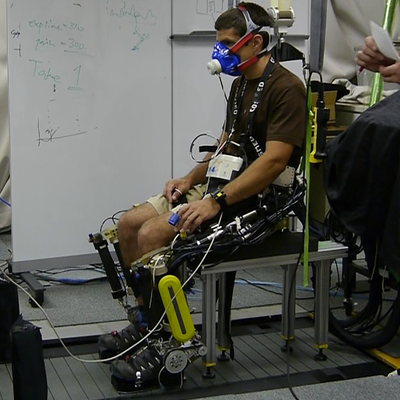
Oseba med eksperimentom, kjer preizkušamo eksoskelet nog in prek porabe človekove energije za gibanje merimo učinkovitost metode vodenja. Foto: Jan Babič
Rezultati našega dela so bili uporabljeni v okviru uspešno zaključenega evropskega projekta CoDyCo, kjer smo raziskovalci iz petih evropskih držav razvili krmilnik humanoidnega robota iCub, ki je del svojih sposobnosti pokazal tudi v televizijski oddaji Italija ima talent.
Trenutno imamo v skupini še dva večja evropska projekta, kjer razvijamo eksoskelete in robote za pomoč in sodelovanje pri opravilih, ki lahko negativno vplivajo na človekovo počutje in zdravje. V okviru projekta Spexor tako razvijamo spinalni eksoskelet za preprečevanje in odpravljanje bolečin v hrbtu, v okviru projekta AnDy pa razvijamo krmilnike, ki pri vodenju robotov upoštevajo ergonomske kazalce oseb, ki z njimi sodelujejo.
***
Jan Babič je doktor znanosti s področja elektrotehnike, raziskovalec in vodja skupine na Institutu Jožef Stefan ter izredni profesor na Mednarodni podiplomski šoli Jožefa Stefana. Ukvarja se s teoretičnimi in eksperimentalnimi raziskavami človekove motorične kontrole in uporabo teh znanj v sodobni robotiki.















